Intro
MicroRNG is a hardware (true) random number generator device that can be used in embedded systems as a reliable source of entropy. This quick guide explains how to use MicroRNG device in UART mode on Linux platforms utilizing a serial interface.
Hardware requirements
- A MicroRNG device configured for 2-wire UART operation mode (‘JP Mode select’ switch is set to position 1-2).
- A Linux system with a serial port available.
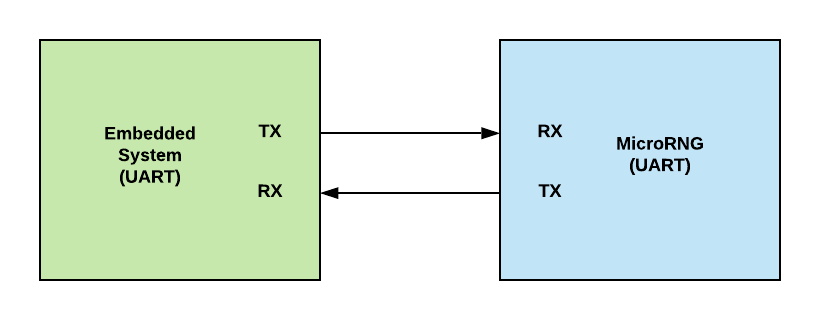
Connecting components
Connect components with wires as shown in the picture below (connect also additional two wires for GND and 3.3V) or utilize MikroBUS socket if available.
A Python sample code for retrieving serial number, version, model and 4 random bytes from MicroRNG as an integer
import serial
#
# The following Python3 sample code demonstrates how to use serial interface in Linux for connecting to MicroRNG device using a 2-wire UART connection.
# Before running this sample code, make sure the jumper of the 'JP Mode select' switch is set to position 1-2 (2-wire UART mode).
# For a complete UART API description visit https://tectrolabs.com/assets/documents/microrng-datasheet.pdf
#
# Set appropriate serial device parameters. Set UART speed as 19200 bps (19200 is a factory programmed default speed for the MicroRNG).
# Replace "/dev/ttyS2" with the appropriate device path specific to your Linux system.
ser = serial.Serial(port = "/dev/ttyS2", baudrate = 19200, timeout = 1)
# Send 'U' command to MicroRNG and make sure that it won't be running in sleep mode.
ser.write(b'U')
# Read the status byte from MicroRNG device
status = ser.read(1)
# The status byte value 0 indicates no errors
if status != b'\x00' :
print("Could not detect a MicroRNG device")
exit()
# Retrieve MicroRNG serial number using 's' command
ser.write(b's')
sn = ser.read(30) # Retrieve serial number as 30 ASCII characters
print("Device serial number: ", sn)
# Read the status byte
b = ser.read(1)
if status != b'\x00' :
print("Could not retrieve serial number from MicroRNG device")
exit()
# Retrieve MicroRNG version number using 'v' command
ser.write(b'v')
ver = ser.read(3) # Retrieve version number as 3 ASCII characters
print("Device version number: ", ver)
# Read the status byte
b = ser.read(1)
if status != b'\x00' :
print("Could not retrieve version number from MicroRNG device")
exit()
# Retrieve MicroRNG model using 'm' command
ser.write(b'm')
model = ser.read(6) # Retrieve model as 6 ASCII characters
print("Device model: ", model)
# Read the status byte
b = ser.read(1)
if status != b'\x00' :
print("Could not retrieve model from MicroRNG device")
exit()
# Send command '1' (code 49) to MicroRNG and request 4 random bytes for building a random integer.
# This 3 bytes command is used to retrieve true random bytes from the MicroRNG device.
# The command byte is followed by a 16 bit unsigned integer which represents the
# requested amount of random bytes (max value is 50000), the lower byte
# is sent first and then the higher byte. The MicroRNG device
# expects to receive all three bytes within a reasonable amount of
# time. There should not be delays longer than 90 milliseconds
# between moments when sending each byte, as part of command,
# otherwise the device will ignore the command.
request = bytearray([49, 4, 0])
ser.write(request)
# Read the response from MicroRNG as 4 bytes.
b = ser.read(4)
# Read the status byte from MicroRNG
status = ser.read(1)
if status != b'\x00' :
print("Could not retrieve data from MicroRNG device")
exit()
# Build a random integer from the retrieved bytes
int_val = int.from_bytes(b, 'little', signed=False)
print("Random integer: ", int_val)